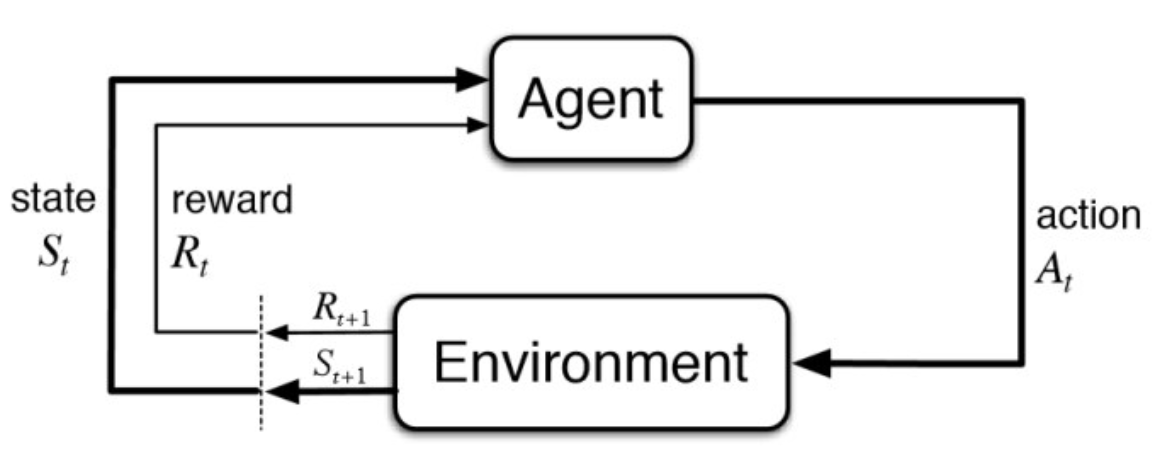
Lec 2 —— Markov Decision Process
⬆️马尔可夫决策过程
马尔可夫链
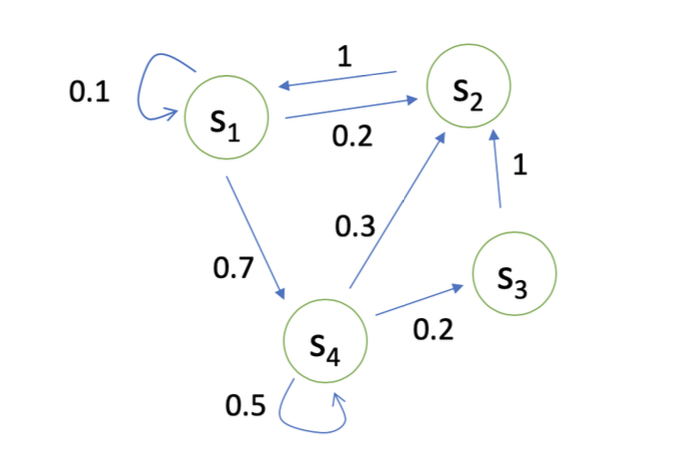
马尔可夫奖励过程
马尔可夫奖励过程 = 马尔可夫链 + 奖励函数
R(s_{t}=s)=\mathbb{E}[r_{t}|s_{t} = s]
Return 的定义
G_{t} = \sum_{i = 0}^n\gamma^iR_{i+1}
Value 函数的定义
V_{t}(s) = \mathbb{E}[G_{t}|s_{t} = s]
\gamma = 0: 只关注当前的奖励
\gamma = 1: 未来奖励和当前奖励相同
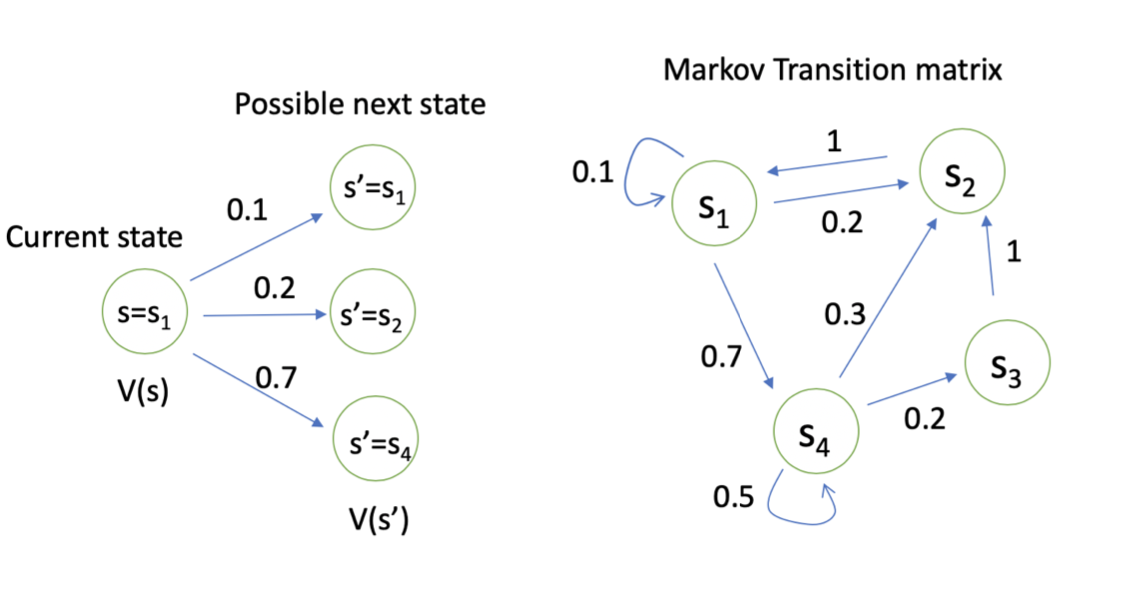
计算马尔可夫奖励过程(MRP)的方法
贝尔曼方程:V(s) = R(s) + \gamma\sum_{s'\in S}P(s'|s)V(s')
求解大型MRP的方法:
- 动态规划
- 蒙特卡洛(采样)
- Temporal-Difference learning(结合1、2)
蒙特卡洛方法
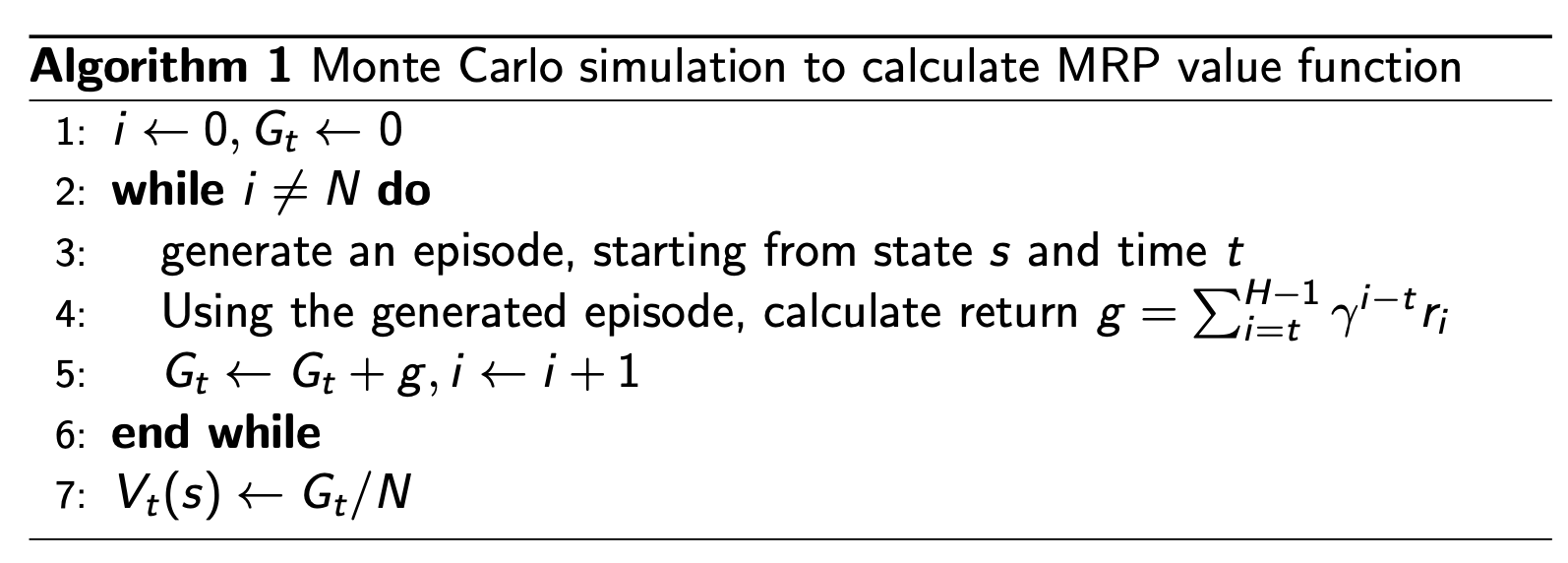
随机产生多条轨迹,取平均
动态规划方法
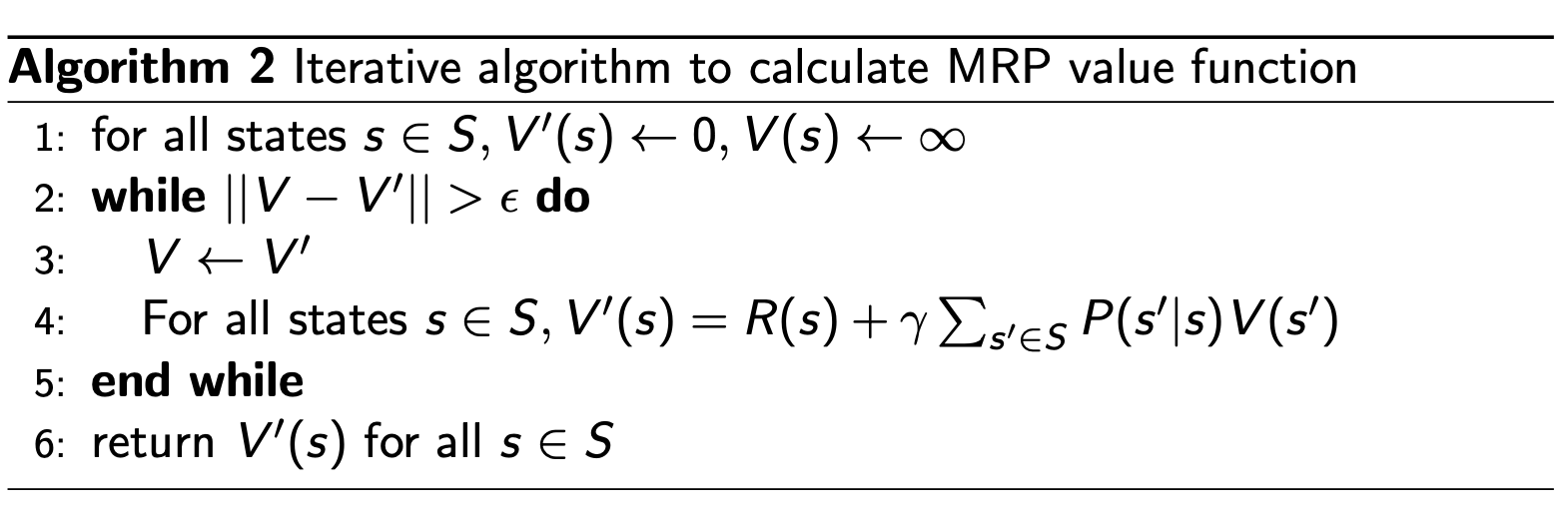
迭代、使收敛
马尔可夫决策过程(MDP)
MDP = MRP + Action
R(s_{t}=s,a_{t} = a) = \mathbb{E}[r_{t}|s_{t}= s,a_{t} = a]
MDP 包含(S, A, P, R, \gamma)
Policy
\pi(a|s) = P(a_{t} = a|s_{t} = s)
给定一个MDP(S, A, P, R, \gamma),和一个策略\pi,可以转换为MRP
MDP的Value函数
- state-value func:
- \mathbb{v}^\pi(s) = \mathbb{E}_{\pi}[G_{t}|s_{t} = s]
- Action-value func:
- q^\pi(s,a) = \mathbb{E}_{\pi}[G_{t}|s_{t} = s, A_{t} = a]
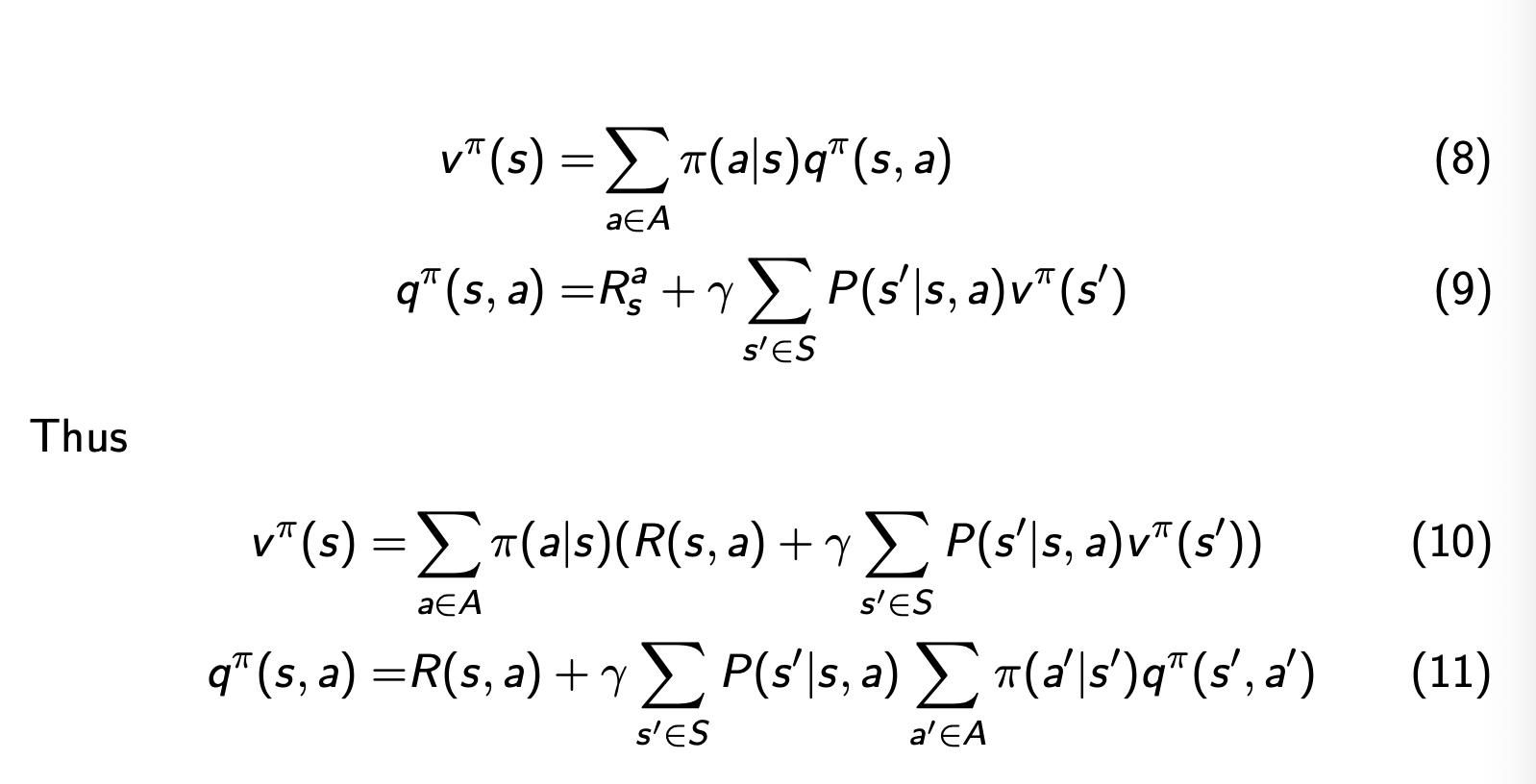
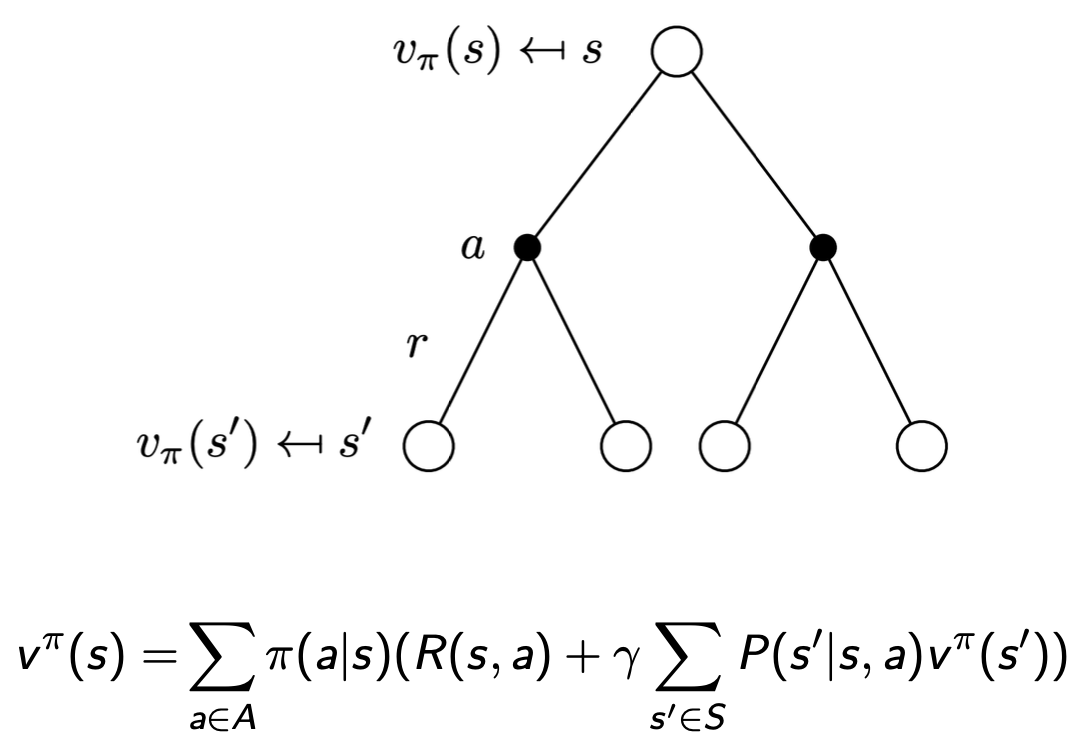
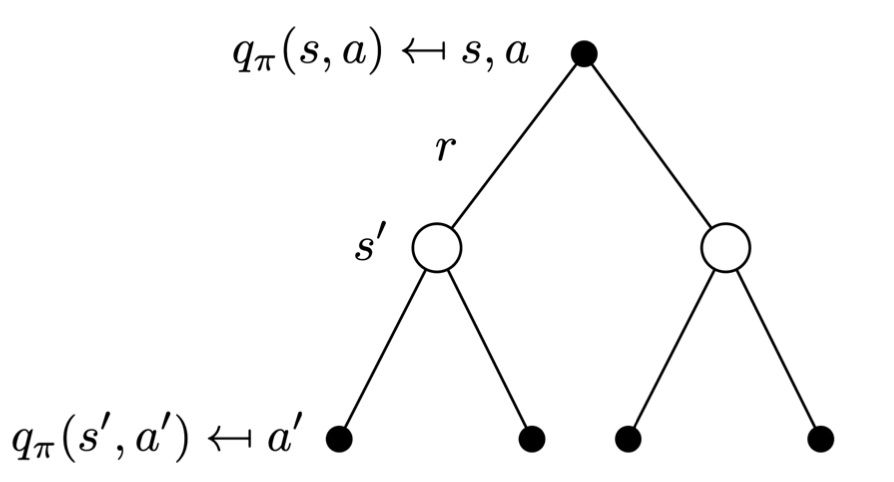
- 于是得到这两个函数的关系:
- v^\pi(s) = \sum_{a\in A}\pi(a|s)q^\pi(s,a )
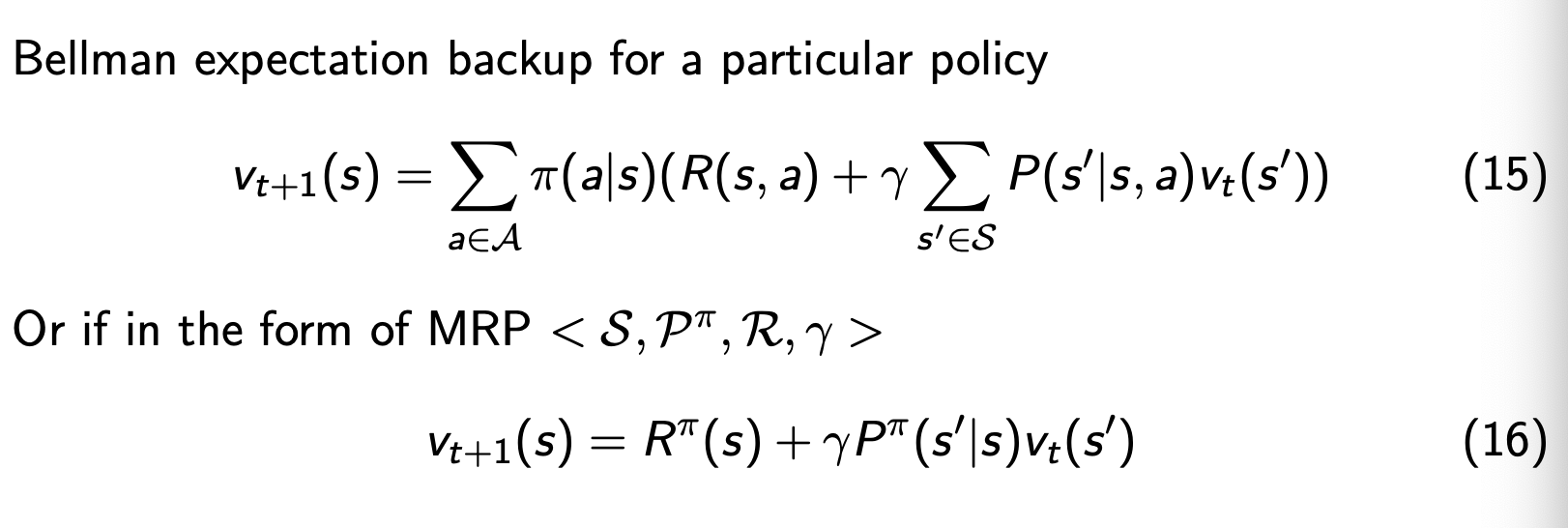
Policy Evalution 评估策略
计算v^\pi(s):与计算v(s)的方法类似
MDP中的决策过程
- 预测:输出v^\pi
- 搜索最优策略:输出最优v^*和\pi^*
给定策略

搜索策略
policy iteration
\pi^*(s) = argmax_{\pi}v^\pi(s)
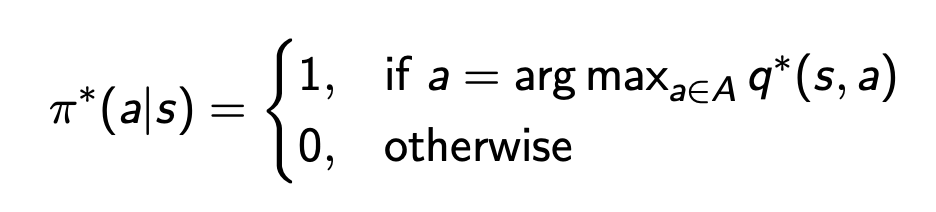
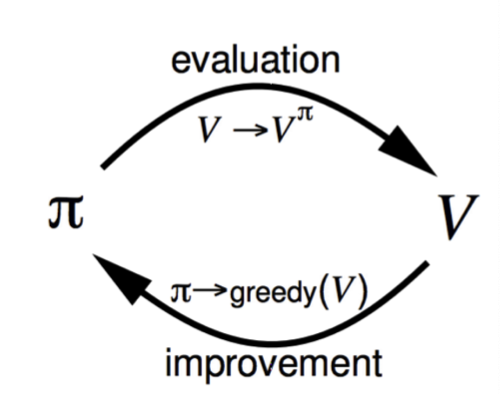
任意选取\pi,计算出v,根据v计算出q,然后更新\pi
由此可得出最佳的policy
于是当改进停止时,Bellman optimality equation 满足
v^\pi(s) = \max_{a\in A}q^\pi(s,a)
value iteration
仅仅优化value,最后retrieve policy